
今天,我们就介绍一下硅麦克风的原理与特点。
按惯例声明一下:我的解释不一定是对的,还可能存在错误,所以仅供参考,欢迎讨论
硅麦克风的 MEMS 部分
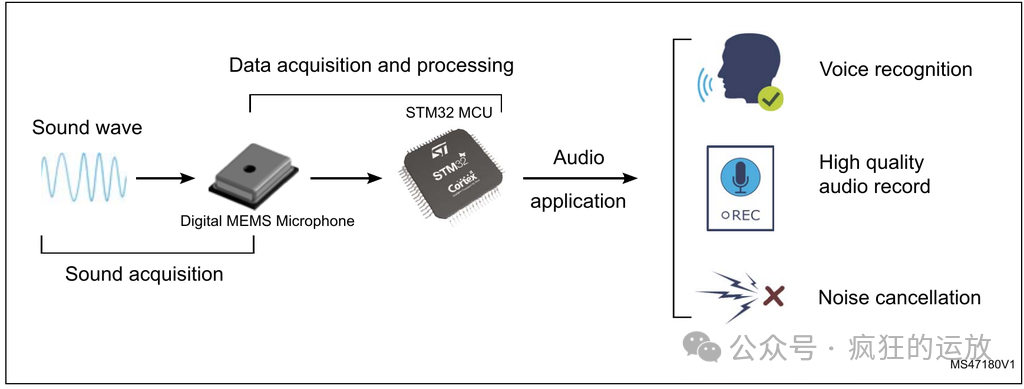
硅麦克风,又称 MEMS 麦克风,它与 Codec / 处理器 等协同工作,完成声音信号的采集与处理:
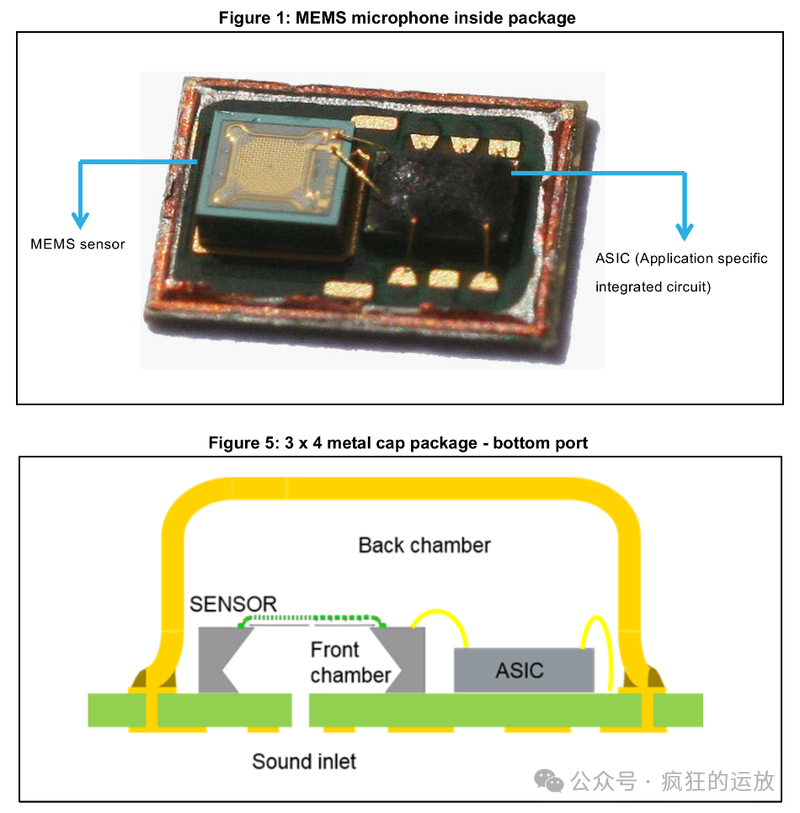
硅麦克风的内部通常包含两颗 Die:一颗是 MEMS 传感器,一颗是 ASIC。前者完成声音与电信号的转换,后者完成信号的放大、量化、编码及输出:
其中,MEMS 全称是微机电系统(Micro-Electrical-Mechanical Systems),这个领域主要研究如何将声、光、电、力、磁等外部信号转换为电信号。
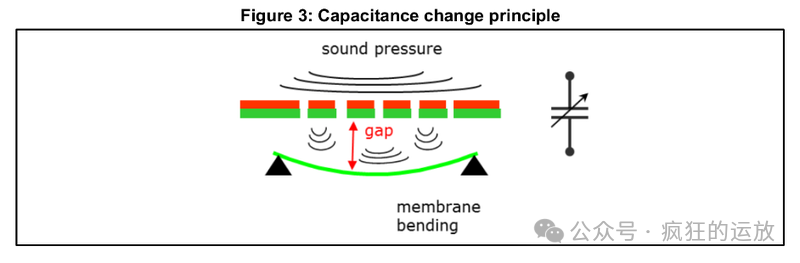
对于硅麦克风来说,MEMS 部分本质上是一个可变电容,它随着声音引起固定极板和可移动极板之间的电容变化:
其实,传统的驻极体麦克风(ECM)也同样视为一个可变电容,但它并非由硅晶圆加工而来,而 MEMS 传感器是采用了硅晶圆加工工艺,因此享有 “硅麦克风” 或者 “硅麦” 之称。
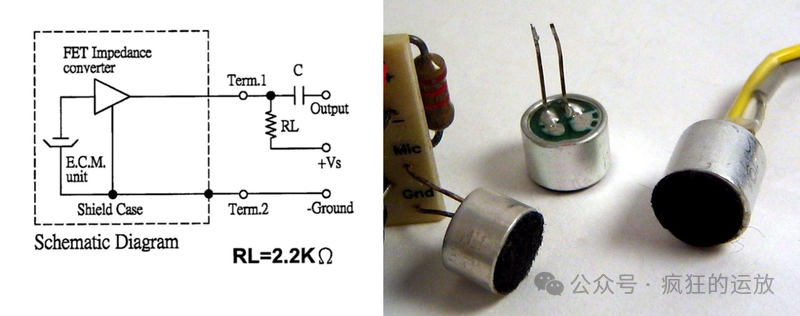
MEMS 是一种基于硅晶圆的传感器加工技术,相比于驻极体麦克风(ECM),能带来更高的集成度、一致性、易于使用等各种优势。
首先要明确的是,硅麦克风 ≠ 数字麦克风。
所谓“数字”指的是输出。硅麦克风既可输出模拟信号,也能输出数字信号,这取决于 ASIC 。
我们在 InvenSense 的 “Analog and Digital MEMS Microphone Design Considerations”(参考资料 [3])中可以看到硅麦克风的内部框图,有三种类型,分别是 模拟、数字 PDM、数字 I2S 类型:
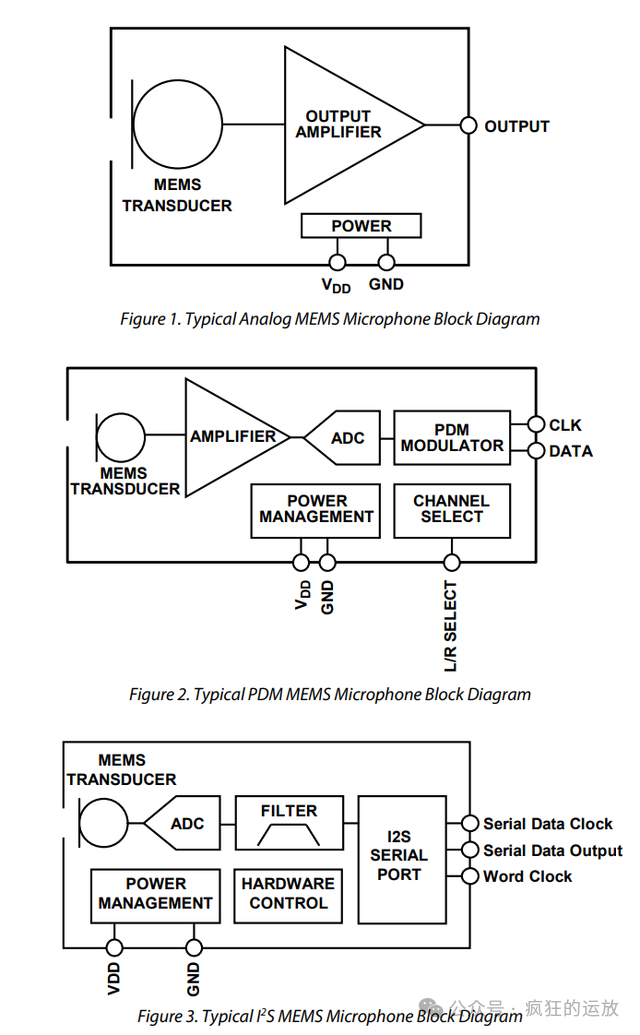
其中:
我们也可以从 Knowles(楼氏)的 “SiSonic Design Guide” (参考资料 [4])中看到硅麦克风输出 PDM 与 I2S 的区别(在此 I2S 输出的是 PCM 编码):
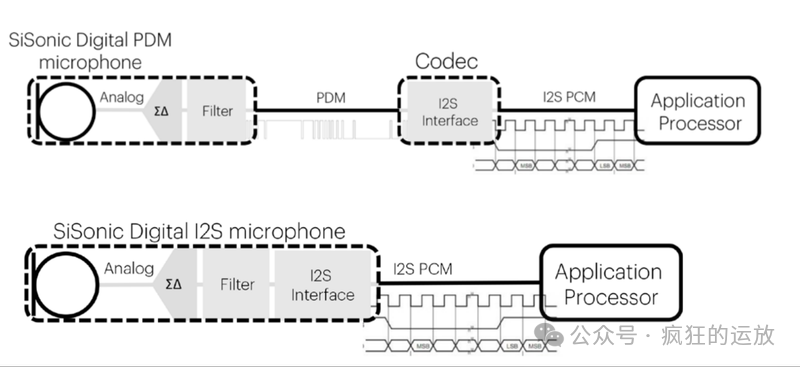
也就是说:音频的采集与转换都需要这些步骤,无非是根据 Codec (PDM 转 PCM)的位置是在硅麦克风 ASIC 内部,或者独立 Codec 器件,或者在处理器内部,有不同的硬件架构和通信方式。
PDM 调制器 是 硅麦克风的精髓,与我们前文讲的 Sigma-delta ADC 工作原理如出一辙。
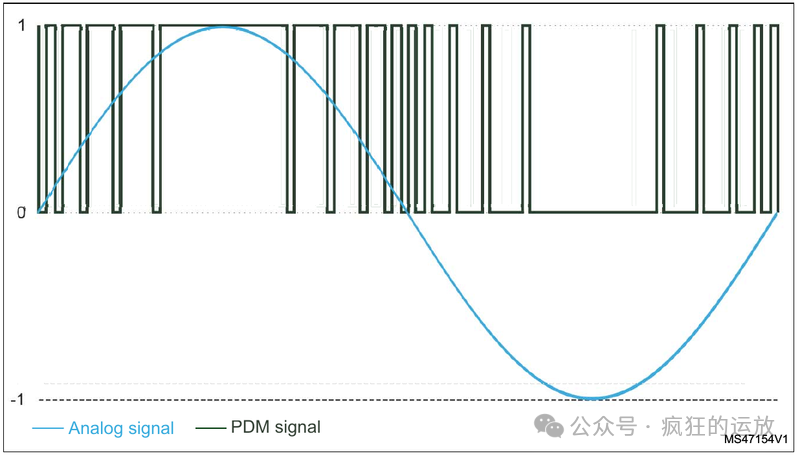
PDM 是一种脉冲宽度调制,它是 1-bit 码流,码流的速率很高,如 512 kHz - 4.8 MHz。原理是大量连续的 “1” 对应较大的模拟电压信号,大量连续的 “0” 对应较小的模拟电压信号:
PDM 码流连接至 Codec 或处理器,它们内部有抽取滤波器(Decimation Filter),可以将 PDM 码流降采样至 8 kHz - 48 kHz 的音频基带频率,并将其转换为 8 bit - 24 bit 的 PCM 数据,以便于对音频进行后续处理。
STM32 中的外设 DFSDM (Digital Filter for Sigma-Delta Modulator)做的就是上述这些事情,在参考资料[1] 中描绘了 PDM 与 PCM 的链路情况,图中蓝线代表 PDM,绿线代表 PCM:
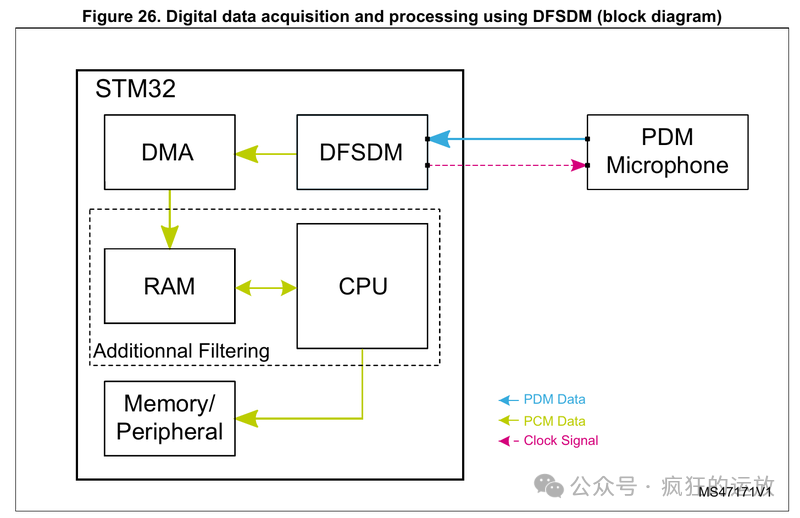
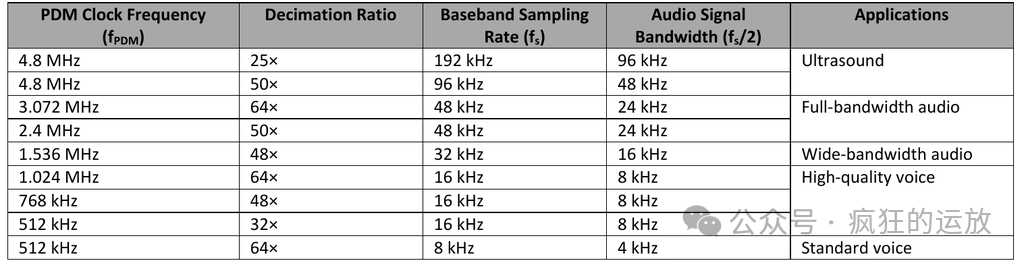
高速 PDM 与音频基带 PCM 之间的“频率”比值称为抽取系数(Decimation Ratio),这个数值在很多音频芯片手册上都能看到,它决定了系统设计上的很多事情,如音频带宽、功耗、噪声、成本……
在 InvenSense 的应用笔记中可以看到 PDM 频率、抽取系数、音频基带采样、实际音频带宽之间的关系。我印象中 3.072 MHz 的 PDM 频率比较常用,当然,现在芯片里还有很多低功耗特性,能把频率玩出了很多花样。
综合来看硅麦克风的工作流程是:



